Cuando un sensor entrega una señal en el orden de los milivoltios, pasa una cosa curiosa: de repente la electrónica deja de ser un mero intermediario y se convierte en protagonista. Una señal de 0–20 mV es tan pequeña que, en un entorno industrial, casi parece una confidencia. Funciona, sí, pero hay que escucharla con mucho cuidado.
El problema es que la industria no vive de confidencias, sino de señales robustas, repetibles y capaces de recorrer cableado sin desmayarse por el camino. Ahí es donde entra uno de los grandes clásicos de la instrumentación: el estándar 4–20 mA. No es casual que lleve décadas usándose. Es simple, resistente y muy práctico.
En este artículo vamos a seguir el viaje completo de esa señal diminuta. La idea es coger una entrada de 0–20 mV y transformarla, paso a paso, en dos salidas útiles: una de 0–10 V y otra de 4–20 mA. Todo ello mediante una arquitectura analógica modular simulada en CircuitJS, lo bastante clara como para ver cada bloque por separado y, al mismo tiempo, entender cómo encajan todos en una misma cadena.
0–20 mV
0–10 V
1–5 V
4–20 mA
1) Planteamiento del problema
A primera vista podría parecer que esto consiste simplemente en amplificar la señal y ya está. Pero no. Si uno se limita a multiplicar una señal pequeña por un número grande, también multiplica el ruido, los offsets y cualquier pequeño defecto que venga de serie. Diseñar un transmisor no es solo hacerla más grande: es traducirla a un lenguaje que el resto del sistema pueda entender sin ambigüedades.
En este caso, el objetivo del transmisor es doble:
- obtener una salida de tensión útil en el rango 0–10 V,
- y traducir esa misma información a una salida industrial en corriente de 4–20 mA.
Dicho de otra forma: queremos tomar una señal frágil y convertirla en una señal de proceso seria, con modales industriales.
2) Etapa de entrada: filtrado y amplificación
La señal de entrada se modela como una onda triangular entre 0 y 20 mV. Antes de amplificarla, pasa por un filtro RC pasivo de primer orden. Aquí conviene hacer una pausa, porque este detalle parece menor y no lo es: amplificar una señal ruidosa es como acercar mucho una foto borrosa. No arreglas nada; solo haces más evidente el problema.
En la simulación se emplean 10 kΩ y 100 nF, lo que produce una frecuencia de corte aproximada de:
Como esta frecuencia es muy superior a la de la señal de prueba, el filtro apenas afecta al contenido útil. Su papel aquí no es “modelar” la señal, sino limpiarla un poco para que el resto del circuito no tenga que trabajar con basura de alta frecuencia.
Después llega la amplificación propiamente dicha. En lugar de hacerla de una sola vez, se divide en dos etapas no inversoras:
- primera etapa con ganancia aproximada de 50.9, usando 49.9 kΩ y 1 kΩ,
- segunda etapa con ganancia aproximada de 9.9, usando 8.9 kΩ y 1 kΩ.
Hacerlo así tiene bastante sentido. Repartir la ganancia hace que el sistema sea más razonable, más estable y más parecido a lo que uno construiría en un diseño real. La ganancia total es el producto de ambas etapas y deja la señal muy cerca del rango 0–10 V.
Si uno quiere resumir esta etapa en una sola frase, sería algo así: cogemos una señal casi microscópica y la llevamos a un tamaño con el que ya se puede trabajar sin entrecerrar los ojos.
3) Escalado lineal y offset: de 0–10 V a 1–5 V
Aquí aparece uno de los trucos más bonitos de todo el circuito. Podría parecer lógico enviar directamente la señal de 0–10 V al bloque de corriente, pero eso daría problemas. Con una resistencia de sensado de 250 Ω, una entrada de 10 V implicaría 40 mA. Y 40 mA ya no es el estándar que buscábamos.
Así que el circuito hace dos cosas a la vez:
- comprime el rango multiplicando por 0.4,
- y lo desplaza hacia arriba añadiendo 1 V.
La ecuación objetivo de este bloque es:
Eso significa que una señal de 0–10 V se convierte en una de 1–5 V. Y ese rango no está elegido al azar: es justo el que permite obtener después un lazo de 4–20 mA cuando se usa una resistencia de 250 Ω.
Escalado
0–10 V → 0–4 V
Offset
0–4 V → 1–5 V
En el fondo, este bloque está haciendo algo muy propio de la instrumentación: no solo cambia el tamaño de la señal, también redefine su punto de partida. Gracias a ese desplazamiento, el mínimo deja de ser 0 V y pasa a ser 1 V, que será precisamente lo que corresponda después a los 4 mA.
4) Conversión tensión-corriente
La etapa final es una fuente de corriente controlada mediante op-amp, transistor NPN y resistencia de sensado. Y aquí es donde todo encaja de una manera bastante elegante. El operacional compara la señal de control 1–5 V con la caída de tensión en la resistencia de emisor \(R_{\text{sense}}=250\,\Omega\). La realimentación se encarga de forzar una condición muy simple:
Y en cuanto eso ocurre, la corriente queda fijada automáticamente por una relación que es casi imposible de discutir:
Luego:
Y ya está. Sin magia. Solo una combinación de realimentación, una resistencia bien elegida y la tozudez de la ley de Ohm.
5) Resultados reales de la simulación
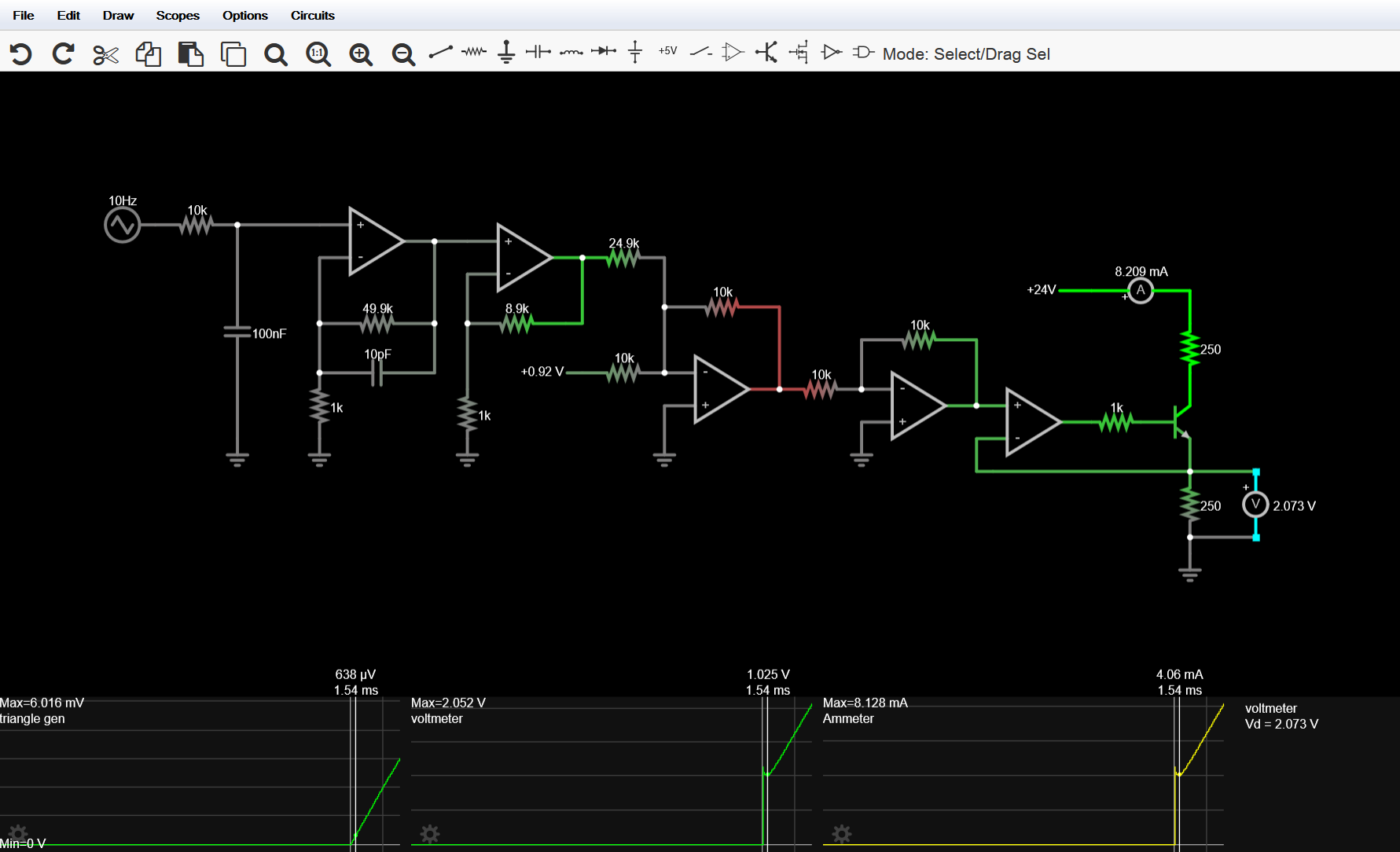
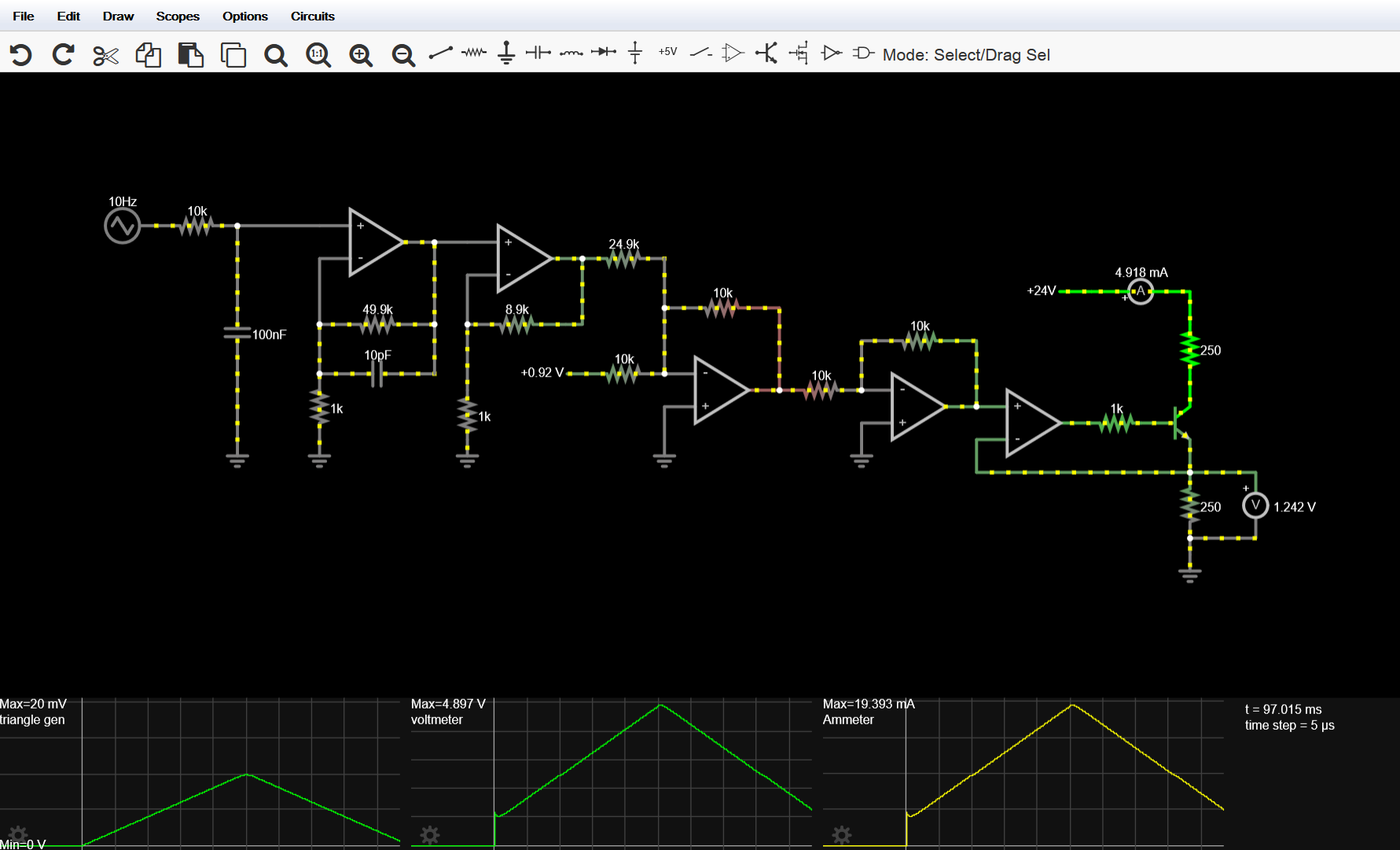
Hasta aquí todo suena muy limpio, casi demasiado. Pero lo interesante de una simulación no es confirmar lo ideal, sino descubrir cuánto se aparta de ello el circuito real que hemos montado. Para eso se han tomado los valores mínimos y máximos observados en los scopes y medidores.
| Magnitud | Mínimo simulado | Máximo simulado |
|---|---|---|
| Sensor | 0 mV | 20 mV |
| Etapa 1–5 V | 1.025 V | 4.897 V |
| Salida de corriente | 4.06 mA | 19.393 mA |
Los números ya dejan ver que el circuito se comporta como debería, aunque no de forma perfectamente ideal. Y eso, lejos de ser un fallo, es precisamente lo que lo hace interesante.
6) Ecuaciones reales del sistema
Aquí llega una de las partes más satisfactorias del análisis: tomar el circuito completo, con todos sus bloques, y reducirlo de nuevo a algo tan sencillo como una recta. Porque, visto desde lejos, eso es exactamente lo que es este transmisor: una máquina que convierte una variable pequeña en otra mayor siguiendo una relación lineal.
6.1) Conversión real de 0–20 mV a 1.025–4.897 V
Tomando los puntos (0 mV, 1.025 V) y (20 mV, 4.897 V), la pendiente es:
La recta real de esta etapa queda:
Es decir: incluso cuando el sensor está en cero, el sistema ya se coloca ligeramente por encima de 1 V. Ese pequeño desplazamiento es el que luego se traducirá en una corriente de reposo algo superior a 4 mA.
6.2) Conversión real de 0–20 mV a 4.06–19.393 mA
Tomando ahora los puntos (0 mV, 4.06 mA) y (20 mV, 19.393 mA), la pendiente es:
La recta real final del transmisor es:
Y esto tiene algo bonito: toda la complejidad del circuito acaba resumida en dos números, una pendiente y una ordenada en el origen.
7) Sensibilidad del transmisor
En instrumentación, la sensibilidad no es más que la pendiente de la curva de transferencia. Suena solemne, pero en realidad responde a una pregunta bastante terrenal: ¿cuánto cambia la salida cuando la entrada cambia un poco?
En este caso, la sensibilidad real del transmisor obtenida en la simulación es:
Interpretación práctica: por cada 1 mV que aumenta la señal del sensor, la corriente de salida aumenta aproximadamente 0.7667 mA.
No es un número “bueno” o “malo” por sí mismo. Es, simplemente, la consecuencia natural de haber decidido mapear un rango de 0–20 mV sobre otro de 4–20 mA.
8) Comentario sobre desviaciones respecto al ideal
Si el circuito fuese perfecto, la ecuación del transmisor sería:
Pero lo que realmente obtenemos en la simulación es:
Las diferencias son pequeñas, pero están ahí. Y, de hecho, sería sospechoso que no lo estuvieran. En un montaje real, este tipo de desajustes aparecen por tolerancias de resistencias, offsets de los operacionales, saturaciones no ideales y, en general, por esa costumbre que tiene el mundo físico de no seguir al pie de la letra nuestros esquemas.
Por eso los transmisores industriales se calibran. Se ajusta el cero, se ajusta el span y se acepta que entre el circuito dibujado en la pizarra y el circuito que acaba funcionando sobre una mesa siempre hay una pequeña negociación.
9) Error final del transmisor
Una vez ajustados el cero y la ganancia, el circuito alcanza un error de fondo de escala inferior al 5%, lo cual es perfectamente razonable para una implementación conceptual y didáctica.
Tomando como referencia el extremo superior ideal de 20 mA y el valor máximo real obtenido en simulación, el error de fondo de escala es:
Este resultado no pretende competir con un transmisor industrial de alta precisión. Lo que demuestra es algo más importante en este contexto: que la arquitectura funciona, que la linealidad general se conserva y que el comportamiento es suficientemente bueno como para explicar con claridad cómo se construye un transmisor analógico de 0–20 mV a 4–20 mA.
Conclusión
Lo interesante de esta simulación no es solo que convierta una señal de milivoltios en una corriente estándar. Lo interesante es que permite ver, casi sin trucos, cómo una cadena de bloques muy clásicos —filtro RC, amplificación no inversora, escalado con offset y conversión tensión-corriente— acaba comportándose como una relación lineal bien definida entre el mundo físico y una señal transmisible.
Con los valores extraídos de la simulación, la transferencia real del transmisor queda descrita por:
y su sensibilidad efectiva es:
Tras la calibración, el error final queda por debajo del 5% del fondo de escala, así que el transmisor puede considerarse aceptable para fines conceptuales, formativos y de divulgación técnica. Y quizá esa sea la mejor forma de resumirlo: al final, un transmisor no deja de ser un traductor. Toma una realidad física pequeña, delicada y algo ruidosa, y la convierte en una señal robusta que el resto del sistema puede entender sin titubeos.
Nota: las imágenes de mínimos y máximos incluidas en este artículo corresponden a capturas de la simulación utilizada para extraer las ecuaciones reales del circuito.