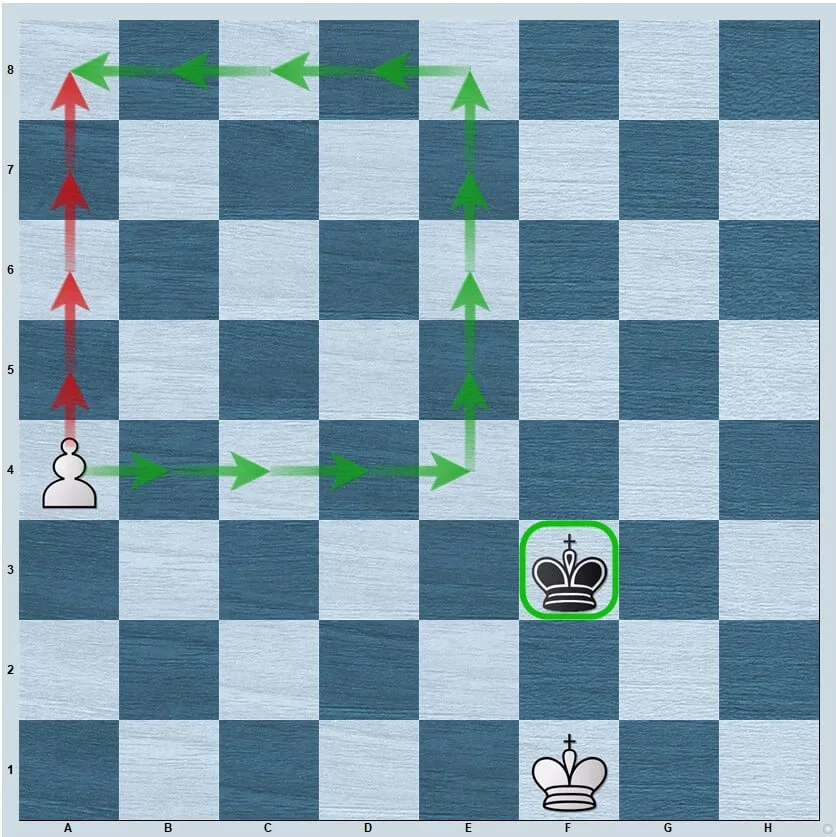
I was in chess class, one of those where they give you a “typical” endgame and the coach drops a phrase like a spell: “the square rule.” He draws a square from the pawn, glances at the king, and in two seconds it’s decided whether the king catches it. Everyone nods… but inside you’re left with the same feeling as when someone says “trust me”: it works, sure — but why?
The square rule is often taught as a visual trick: you draw a square from the pawn and, if the king is inside, it catches the pawn before it promotes. It works… but it can feel like magic.
Here we de‑magic it in “couch science” mode: we turn it into a general reachability problem on a graph with a time horizon, and reduce it to solving inequalities. If you like “why” more than “look at this rule,” this is your post.
0 · The general idea (principles)
To avoid getting lost, we’ll follow three simple principles:
- Principle 1 (discrete): pieces don’t move on a continuous plane; they jump between squares. That suggests working with graphs (state networks).
- Principle 2 (induced metric): the relevant “distance” is not ruler distance on paper, but the one defined by the real movement cost: number of turns.
- Principle 3 (space‑time): the pawn is not a fixed target; it is a trajectory in time. Capturing means intercepting that trajectory before a deadline (promotion).
With that, the plan is: model the king as a graph → identify the right metric → write capture as
“∃ t” → substitute coordinates → you’re left with inequalities.
1 · The board as a graph
A graph is just “places” and “connections between places.” If you prefer analogies: a subway map (stations and lines), or Google Maps (intersections and streets).
Here the “stations” are squares and the “lines” are legal king moves. This is not pedantry: in a graph, the natural distance is “minimum number of edges,” which is exactly “minimum number of turns” in chess.
Now the king’s edges: EK is the set of pairs (u,v) such that the king can go from u to v in one move.
And the full king graph is: GK = (V, EK). Positions + transitions.

What does dist_G(u,v) mean?
In a graph, dist_G(u,v) is graph distance: the minimum number of steps to go from u to v.
Subway analogy: minimum number of stops. Chess: minimum number of turns.
Where “~” just means “there is an edge between those two squares.”
What does Reach(u,t) mean?
Reach(u,t) is the set of squares you can reach from u in t moves or fewer.
Think of it as the “action radius” of a robot with a limited battery: with t units of energy, what area can it cover?
This object will be the star: if the pawn’s trajectory enters this cloud at any time, there is capture.
2 · Why it’s not Euclidean (and √2 makes a cameo)
Key idea: the geometry on paper is not the king’s geometry.
In Euclidean geometry (Pythagoras), moving one square horizontally costs 1, vertically costs 1, and diagonally costs √2.
But the king doesn’t pay √2 for a diagonal: a diagonal costs 1 turn, the same as a straight move. So the effective metric cannot be Euclidean (L2). It is a movement‑induced metric: cost = turns.
The correct metric is L∞ (Chebyshev): the cost is set by the “slowest” coordinate. Informally: if you can fix x and y at the same time (diagonal), then what limits you is the larger of the two corrections.
One can justify that d∞ equals the king’s graph distance: a lower bound
(you can’t change either coordinate by more than 1 per turn) and an explicit construction
(diagonals while possible, then straight moves).
Lemma 1 · Lower bound
Lemma 2 · Upper bound
Theorem 1 · King distance
Visual translation: reachable squares in t turns under this metric form a square (L∞), not a circle (L2). The “square” from the rule starts to peek through.
ASCII diagram · L∞ ball (a perfect square)
An L∞ ball of radius 2 around the king is a centered 5×5 block. Everything marked # is within ≤2 king moves.
B∞(K,2) (5×5 square)
# # # # #
# # # # #
# # K # #
# # # # #
# # # # #
3 · The pawn brings time into the equation
So far the target was fixed: “reach a square.” But the pawn moves: it’s a moving target. In control/robotics this is interception: you chase something that advances while you move.
Mini‑bridge (problem shift): so far we measured “how many turns the king needs to reach a fixed square.” With a pawn we change the game: the target moves. It’s not enough to arrive somewhere; you must arrive when the pawn is there. That’s an interception problem (pursuit with a clock).
We use the clean model behind the classical rule: the pawn advances 1 square per turn toward promotion, with no blocks. Define its trajectory and the time horizon.
n is the deadline: the number of moves before the pawn reaches y=8 and promotes.
4 · Interception = “∃ t”
This is the bridge between “visual trick” and math: capture means there exists a time t (before the deadline) at which the king can be on the same square as the pawn.
Note the ≤ t: it means “arrive by time t,” not “exactly at t.” If the king arrives early, it can wait.
Now use Theorem 1: replace graph distance by L∞ (this is an identity, not an approximation):
Analogy: a discrete relativistic light cone
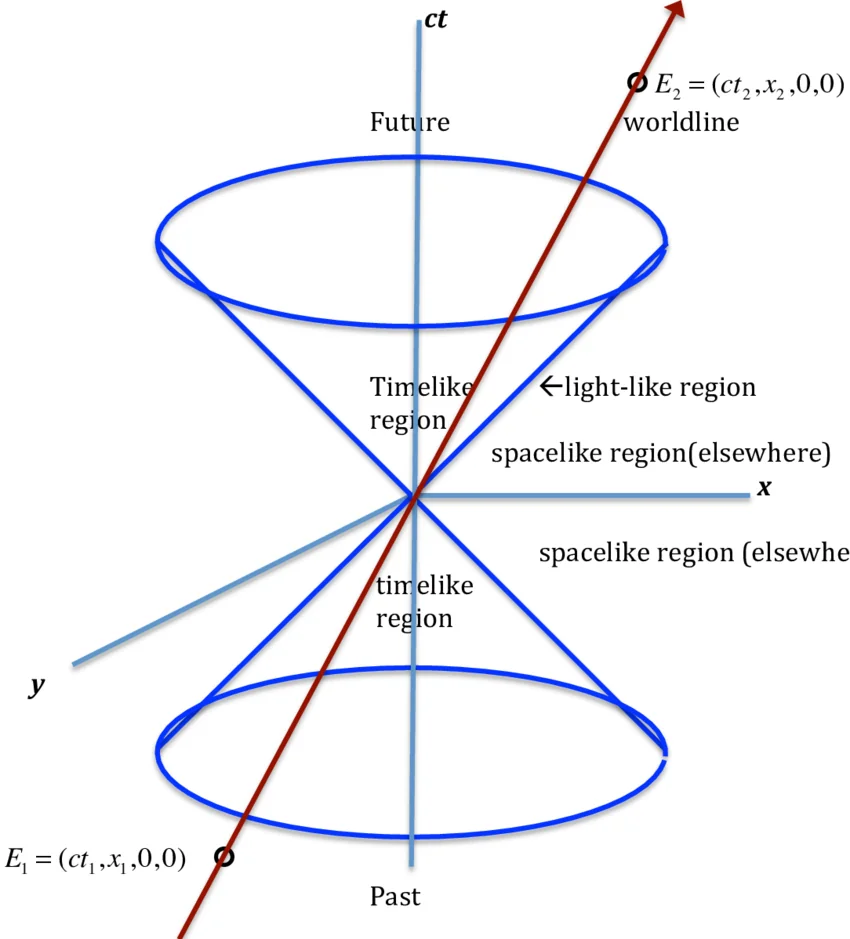
Reach(k₀,t) over time.
If you like physics, this mental picture is powerful: in relativity, from an event (t=0) there is a light cone: the set of space‑time points you can reach without exceeding the speed of light.
Here something similar happens, but discretely: the king’s “speed limit” is 1 square per turn (including diagonals).
From the initial position k₀, the set Reach(k₀,t) is its reachable “causal front” at time t.
Stack these regions for t=0,1,2,… and you get a discrete causal cone. The pawn traces a line (its worldline).
Capture = intersection of worldline and cone.
Sketch (reachability layers):
t=0: K
t=1: ( 3×3 )
t=2: ( 5×5 )
t=3: ( 7×7 )
...
(pawn worldline = a column that rises)
(intersection = capture)
Concrete example: the light cone (Minkowski) and the “king on the board” parallel
Let’s put numbers so the analogy stops being poetry and becomes mechanics.
In a 1+1 Minkowski diagram (time axis and one space axis), using units where c = 1:
- Light emitted at
E₀ = (t=0, x=0)can only reach events(t, x)satisfying |x| ≤ t. - The cone boundaries (the light itself) are x = +t and x = −t.
For example, (t=3, x=2) is inside because |2| ≤ 3.
But (t=3, x=5) is outside: it would require a signal faster than light.
Light cone (1+1, c=1)
t
^
| /
| / boundary: x = +t
| /
| • (t=3,x=2) inside
| /
| /
| /
| /
|/______________> x
\
\ boundary: x = -t
\
• (t=3,x=5) outside (not allowed)
Now the king’s discrete parallel is the same kind of constraint, but with a different metric:
each turn, the king can change x and y by at most 1 (including diagonals).
After t turns the allowed region is:
In both cases the common idea is: there is a propagation limit and “capture” is an intersection between a trajectory (worldline) and a reachable region.
5 · From geometry to inequalities
Now we do the applied‑math thing: choose variables that capture “what matters” and switch to algebra. Two initial separations matter: horizontal and vertical. Absolute values appear because direction doesn’t matter, only magnitude.
Substitute the pawn trajectory into d∞:
Now write capture as an explicit inequality:
Read it like this: by turn t the king has t moves; it can correct at most t columns and t rows.
The condition says: “at that turn, both horizontal and vertical separations (the worst of them) fit in the budget t.”
6 · The square rule (an initial condition)
The classic rule says: “if the king is inside the square, it catches.” In this language: “if the initial L∞ distance from king to pawn is ≤ n.”
The beauty: the original problem was space‑time (moving target), but the answer becomes an initial condition. That’s why it’s such a fast mental rule.
Proof sketch (rigorous)
7 · Why you draw a “square”
The square appears because an L∞ ball of radius n is an axis‑aligned square: “distance ≤ n” means “both coordinates are within margin n.”
Couch summary: the king lives in a non‑Euclidean “space” because diagonals cost 1 turn, not √2. That cost induces L∞; L∞ produces squares; and chasing a pawn becomes an “∃ t” that reduces to a simple initial inequality.